MediaFlies
A Video and Audio Remixing Multi Agent
System
Dr. Daniel Bisig,
BSc, PhD.
Artificial Intelligence Laboratory,
University of Zurich, Switzerland.
e-mail:
dbisig@ifi.unizh.ch
Prof. Dr. Tatsuo
Unemi, MEng, DEng.
Department of
Information Systems Science, Soka University, Tokyo, Japan.
e-mail: unemi@iss.soka.ac.jp
Abstract
The project MediaFlies realizes
an interactive multi agent system, which remixes life and prerecorded audio and
video material. Agents engage in flocking and behavior synchronization and
thereby control the material's continuously changing fragmentation and
rearrangement. Visitors can influence the agents' behaviors via a video
tracking system and thus shift the ratio of disorder and recognizability in
MediaFlies acoustic and visual feedback.
1. Introduction
Research in the field of Artificial Life and Artificial
Intelligence forms an important conceptual and technical background for people
who produce algorithmic and generative art. In these fields, art and science
share a common interest in issues such as emergence, self-organization,
complexity, autonomy, adaptivity and diversity. Complex and self-organized
systems have a great appeal for art, since they possess the capability to
continuously change, adapt and evolve [1] A group of animals such as a flock of
birds constitutes an example of a self-organized system. Flocking algorithms,
which model these behaviors, are mostly based on the seminal work of Craig
Reynolds [2] Flocking algorithms give raise to lifelike and dynamic behaviors
that can easily be adapted to control a variety of visual or acoustic
parameters. In addition, interaction with a flocking based artwork often seems
very intuitive and natural. Examples of flocking based generative systems
include robotic works such as ”ARTsBot” [3], interactive musicians [4],
generative sound synthesis [5][6], virtual orchestras [7][8][9], and
interactive video installations such as “SwarmArt” [10] and “swarm” [11]. The
project MediaFlies is similar to the works of Blackwell and Shiffman, in that
it employs a sample driven approach to generative art. The system doesn’t
create it’s output entirely de novo but rather by combining human generated
visual and acoustic input with the generative activity of the flock. We are
convinced that this approach yields a very interesting potential for generative
art, in that it tries to combine human and machine based creativity and
aesthetics.
2. Concept
MediaFlies resembles an artist whose creative approach is
based on an analysis and subsequent reconfiguration of source material into an
audiovisual collage. This source material, which stems from an archive of
digital media material and the system's own audiovisual perceptions,
continuously feeds into MediaFlies memory. The memory forms a three-dimension
space, which is populated by a swarm of agent's. These agents continuously
collect and discard memory fragments as they roam this audiovisual memory. Via
their mutual interactions, the agents collectively structure these fragments
into associative patterns, which eventually resurface as amorphous or distinct
features in the constantly shifting stream of acoustic and visual feedback.
MediaFlies is an interactive system in that the visitor can
influence the behavior of the flocking agents. Fidgety visitors disrupt the
generation of recognizable associations up to the point of pure visual and
acoustic noise. Calm visitors promote the formation of highly structured and
organized feedback regions, which eventually reform into the visitors’ own
mirror images.
3. Implementation
MediaFlies is written in C++ and implements a multi-agent
system whose behavior is controlled via a flocking simulation and behavior
synchronization. The agents operate on visual and acoustic data, which is
acquired via life capture and from stored media material. Visual material is
fragmented into small rectangular regions and subsequently recombined via
multitexturing and alpha-blending. The fragmentation and recombination of audio
material is based on granular synthesis. The spatial position of video and
audio fragments is controlled via the movement of the agents. The parameters
controlling the generation of these fragments are influenced via behavior
synchronization. Interaction is based on video tracking and includes both detection
of the visitors’ positions and direction of movements. These implementations
are described in more detail in the following subsections.
2.1 Media Acquisition
MediaFlies operates on life and prerecorded video and audio
data. Life material is acquired via a standard DV-camcorder and a directional
microphone. This material is subsequently fed into two ring buffers (see figure
1 left image). A video ring buffer stores individual video frames in sequential
order. Similarly, an audio ring buffer stores audio samples. The current
version of MediaFlies segments each ring buffer into several regions, which
operate independently. For this reason, MediaFlies can acquire media material
at a variety of update rates and feed them into different regions of the corresponding
ring buffers (see figure 1 right image).
2.2 Agent System
In MediaFlies, agents populate a 3D world that is continuous
in time and space and which exhibits periodic boundary conditions. Agents
update their neighborhood relationships by employing an Octree space
partitioning scheme. The spatial extensions of the agent world overlap with the
ring buffers (see figure 1 right image).
Accordingly, a position within the agent world corresponds
to a position within each ring buffer. Agents are organized within agent
groups. These groups manage the behavioral repertoire of all agents contained
within. This repertoire consists of a list of basic behaviors, each of which
conducts a single activity (such as moving away from another agent or changing
the duration of a sound grain).
MediaFlies implements several agent groups. A relatively
small group of agents (100 - 400) conducts true flocking. Agents in a
significantly larger second group (500 - 4000) simply move towards the flocking
agents. By this method, a larger number of agents can be simulated than if all
agents would conduct proper flocking. Two additional agent groups are directly
responsible for generating MediaFlies feedback. These feedback agents simply
copy their positions from the second agent group. The parameters that control
the agent's feedback generation are modified via behavior synchronization.
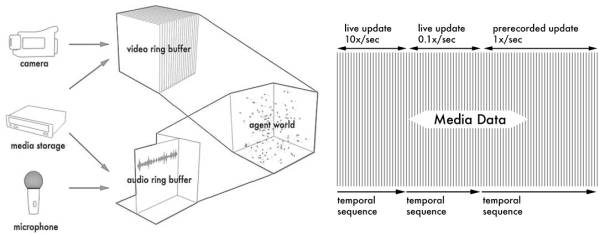
Figure
1: Media Acquisition. Left image: Live and prerecorded audio and video is
continuously fed into ring buffers, which posses the same spatial extensions as
the agent world. Right image: A ring buffer consists of a series of regions,
each of which is updated at different intervals and with different media
material.
2.3 Flocking Simulation
The flocking algorithm is closely related to the original
Boids algorithm [2]. It implements the three basic behaviors of alignment,
cohesion and evasion (see figure 2). The basic repertoire of flocking behaviors
has been extended with two additional behaviors, which control how the agents
respond to interaction (see section 2.7). Every flocking behavior generates a
force that is added to the agent’s overall force vector. At the end of a simulation step, the agent’s
theoretical acceleration is calculated from this summed force. By comparing the
theoretical acceleration with the agent’s current velocity, linear and angular
acceleration components are derived and subsequently clamped to maximum values.
Finally, the agent’s velocity and position are updated by employing a simple
explicit Euler integration scheme.
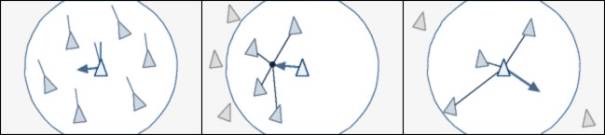
Figure
2: Flocking Behaviors. From left to right: Alignment: Agents adapt magnitude
and direction of their velocity to the average velocity of their neighbors.
Cohesion: Agents move towards the perceived center of their neighbors. Evasion:
Agents move away from very close neighbors.
2.4 Behavior Synchronization
Each feedback agent possesses a set of behaviors that
control the generation of a single visual or acoustic particle (see sections
2.5 and 2.6). Each of these behaviors depends on a set of parameters that
control it’s output. The term behavior synchronization refers to the fact that
neighboring agents constantly shift these parameters in response to each other
towards some optimal value. A high degree of synchronization is achieved
whenever agents possess many neighbors and all neighbors move coherently.
Parameters are implemented as vectors. A parameter vector is
calculated as a weighted sum of a direct vector and two offset vectors (see
figure 3). The direct vector is obtained via a linear mapping of an agent’s
position or movement from agent space to parameter space. The local offset
vector represents the difference between an agent's parameter value and the
averaged parameter value of it’s neighbors. The ideal offset vector represents
the difference between an agent's parameter value and a global ideal value from
which the parameter value shouldn't deviate too much. Prior to addition, these
offset vectors are multiplied by a value that balances each offset vector's
influence on the parameter vector (see equations 1 left equation). A target
local offset vector is obtained by calculating the difference between the
direct and local vector. The updated local offset vector results from shifting
the previous offset vector according to an adaptation rate towards the target
offset vector (see equations 1 right equation). The same principle applies to
the calculation of an updated ideal offset vector. For some parameters, it is
preferable to maintain a certain difference between parameter values of
neighboring agents. This difference is stored in a further vector (named
“neighbor parameter deviation”) and added to the local vector (see figure 4).
Equations
1: Left Equation: Parameter Vector Calculation. Right Equation: Offset Vector
Update.
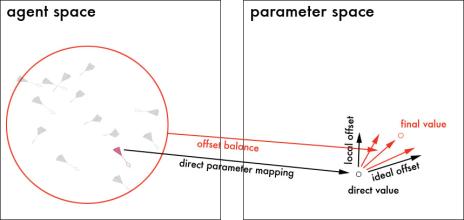
Figure
3: Parameter Vector Calculation.
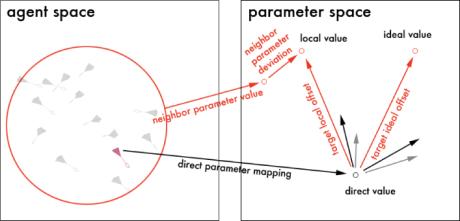
Figure
4: Offset Vector Update. Offset vectors at time t are depicted as unlabeled
gray arrows, offset vectors at time t+1 are depicted as unlabeled black arrows.
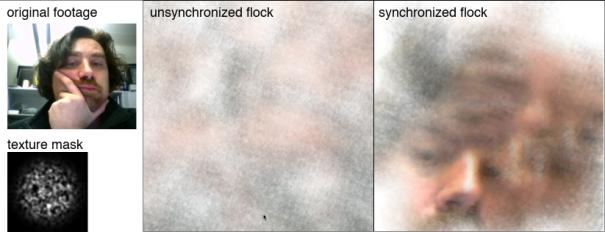
2.5 Visual Feedback
Visual feedback is generated, by blending a multitude of
small rectangular image fragments into a seamless cluster of visual material.
These image fragments represent regions within the video ring buffer. Alpha
blending is controlled via static grayscale images, which act as alpha masks
(see figure 5). Video regions and alpha masks are multi-textured onto
quadrangles, which are implemented as billboards (i,e. they always face the
camera). The choice of alpha mask significantly affects the visual feedback.
High contrast masks cause flickering and interference like effects when
fragments shift across each other (see right two examples in figure 5). Low
contrast and smooth masks lead to “painterly” effects (see left two examples in
figure 5). Each video feedback agent controls the position and texture coordinates
of a single image fragment. Texture coordinates are implemented as 3D vectors
since they define not only a 2D image subregion but also a temporal position
within the video ring buffer. Texture coordinates are subject to
synchronization. The direct vector is derived from the agent's position. The
local offset vector points towards a position, which deviates from the local
value (see figure 6). This deviation is calculated from the difference in the
agent’s position and neighbor’s position in agent space, and is subsequently
mapped into texture coordinates space. For this reason, synchronization will
eventually recreate the original image material.
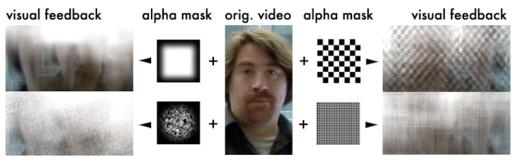
Figure
5: Masking and Visual Feedback.
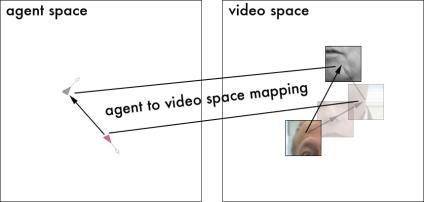
Figure
6: Texture Coordinate Synchronization.
2.6 Acoustic Feedback
MediaFlies employs a similar approach for the generation of
audio and video feedback. Audio material is modified into a continuous audio
stream via a fragmentation and recombination process. This process is based on
a combination of granular and subtractive synthesis. The steps involved in the
generation of audio feedback are depicted in figure 7.
Figure
7: Steps in Audio Processing.
Figure
8: Control Parameters for Audio Generation. Lines and arrows indicate agent
based parameter control. Single and double-headed arrows indicate
synchronization dependent parameter control.
The audio ring buffer is continuously fed with live and
prerecorded audio material. The ring buffer is scanned for audio parts, which
are above a certain amplitude threshold. These parts are labeled as emphasis
regions. Grains are created exclusively from emphasis regions. This approach
prevents audio feedback from becoming inaudible when very quiet audio material
is partially present in the ring buffer. The implementation of granular
synthesis is largely based on a publication by Ross Beninca [12]. Individual
grains are filtered via a bandpass filter and spatialized for stereo or
quadraphonic playback. Each audio feedback agent controls a set of parameters
for the generation of a single audio grain (see figure 8).
Ring buffer tap speed, grain start time, and bandpass filter
center frequency are synchronized among agents. Similar to synchronization of
texture coordinates, grain start times shift towards values that differ among
neighboring agents. Ring buffer tap speed is currently the only parameter,
which possesses a global target value. This target value corresponds to a ring
buffer readout rate that equals the sampling rate.
2.7 Interaction
Visitors can influence MediaFlies audiovisual feedback in
essentially two ways. They provide life video and audio source material for
processing. In addition, their position and movement is detected via video
tracking and affects the behavior of the flocking agents. Tracking is mostly
based on standard image segmentation techniques (see figure 9).
The running average method (Picardi, 2004) is employed to
discriminate foreground and background. Movement detection is based on the
calculation of a motion history image, from which gradient vectors are derived.
In order to obtain not only motion direction but also motion magnitude, a
custom-processing step has been included. This custom step elongates motion
vectors along regions of constant brightness within the motion history image.
Video tracking results in the formation of two 2D fields, which are coplanar
with the x and y axis of the agent world and whose values extend along it's
z-axis. Flocking agents react to these fields via corresponding basic
behaviors.
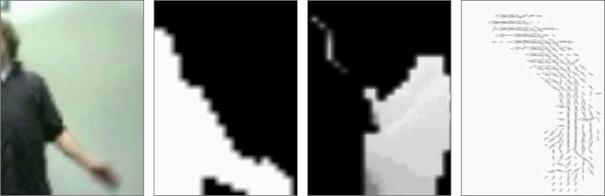
Figure
9: Video Tracking. From left to right: camera input image, background
subtracted threshold image, motion history image, gradient vectors.
The “attraction field behavior” causes agents to sense
within their perception range scalar values that are derived from background
subtracted threshold images. Highest values in this field correspond to the
foreground and lowest values to the background of the current threshold image.
Intermediate values result from a diminishing influence of previous threshold
images. The force vectors produced by this behavior causes agents to move
laterally towards high scalar values (see figure 10 left image) as well as
towards the front region of the agent world.
The "motion field behavior” applies a force vector to
an agent, which is proportional to the average of the motion vectors within the
agent's perception field (see figure 10 right image). These motion vectors are
identical to the gradient vectors calculated by video tracking.
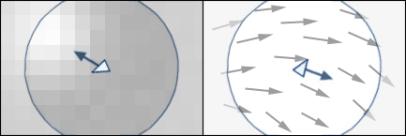
Figure
10: Interaction Behaviors. From left to right: Attraction field behavior:
agents move towards high values in the surrounding scalar field. Motion field
behavior: agents move into the average direction of nearby motion vectors.
Interaction tends to disrupt the agents’ normal flocking
behavior. Stationary or slowly moving visitors cause agents to slow down and
gather at the visitors’ positions. Quickly moving visitors cause agents to
accelerate and disperse throughout the agent world. Both effects exhibit an
indirect but significant effect on MediaFlies audiovisual feedback. Agents that
occupy the frontal part of the agent world predominantly operate on live video
and audio material. Agents that reside further back use mainly prerecorded
media material. Slowly and coherently moving agents excel in synchronization
and cause the creation of dense and clustered regions in the audiovisual
feedback. These regions clearly reproduce the original media material (see
figures 11 and 12 right image). Fast and incoherent agent movements supersede
synchronization behavior and cause amorphous and diffuse clouds of unrelated
media fragments to dominate audiovisual feedback (see figures 11 and 12 middle
image).
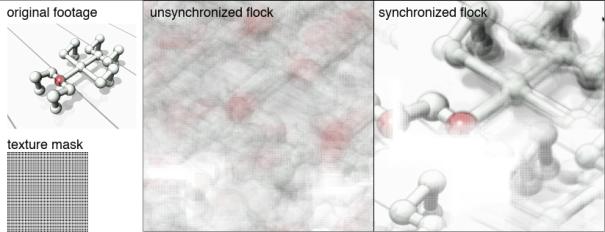
Figure
11: Synchronization of Prerecorded Video Material.
Figure
12: Synchronization of Live Video Material.
3. Results and Discussion
MediaFlies has been shown as an installation at the
Tweakfest festival in Zurich (Switzerland), the AI50 summit on Monte Verita
(Switzerland), and within the exhibition section of the ACE2006 conference in
Hollywood (USA). The installation setup varied from event to event but was
usually placed close to a highly frequented passageway or a bustling public
space such as a cafeteria. The casual environment proved to be ideal for
MediaFlies since it generated rich audiovisual input for live capture. In
addition, the diversity of interaction based agent responses was large, since
both stationary and fast moving visitors intermixed.
The software was run either on a Dual G5 Macintosh or a
MacBook Pro. Visual output was presented via front or rear video projection or
on a large plasma screen. Audio output was fed into a stereo or quadrophonic
speaker setup or delivered via a set of wireless headphones. Video tracking was
conducted via an iSight webcam. Live video material was either obtained from a
second iSight webcam or a miniDV camcorder. Live audio material was obtained
from a shotgun microphone. Concerning prerecorded media material, content was
chosen that reflected the conceptual idea of agents wandering as thought
particles through a space of audiovisual perceptions and memories. Examples of
such material include images of faces and sounds of voices, which represent
personal memories or textural material, which stands for emotional memories.
Figure 13 depicts a few examples of visual feedback that has been generated by
MediaFlies.
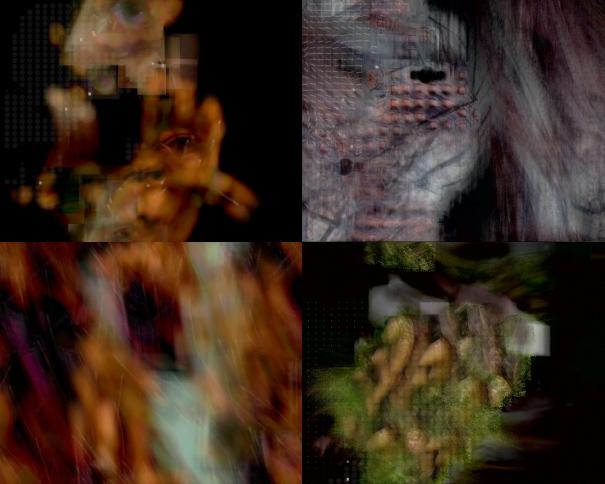
Figure
13: Examples of MediaFlies Visual Feedback.
In between these exhibitions, MediaFlies has progressed
through a series of modifications, which took feedback by visitors into
account. Initial reactions were very positive concerning the characteristics of
MediaFlies audiovisual feedback, which seemed to reflect the situation and mood
of it’s environment. During moments of hectic activity when people were rushing
through the passageway, MediaFlies created fast paced movements of highly
dispersed and quickly changing image and audio material (see figure 13 bottom
left). These moments contrasted with more tranquil situations when people were
standing or slowly walking. MediaFlies responded to these type of situations by
creating slowly moving clusters of audiovisual fragments that blended together
into recognizable features of the physical surrounding (see figure 13 top
left). Interaction with MediaFlies proved to be somewhat problematic. Some visitors failed to notice that they
could affect MediaFlies behavior. An even larger number of visitors didn't
understand how MediaFlies feedback correlated with their own behaviors. These
reactions led to the following changes in MediaFlies implementation. The
interaction based 2D fields are visualized as graphical representations and are
part of MediaFlies feedback. The attraction field is depicted as an array of
white circles whose radius is proportional to the attraction values (see figure
13 top left). The vectors in the motion field are depicted as white lines of
corresponding orientation and length (see figure 13 top right). Furthermore,
the interaction dependent agent behaviors are now easily distinguishable from
flocking related behaviors. Agents, which respond to interaction either accelerate
towards much higher velocities than they exhibit during flocking or they become
entirely motionless. These behaviors possess a direct and visually very
distinct impact on MediaFlies feedback.
In it’s most recent incarnation, MediaFlies still suffers from
some technical issues. The computational demands of the system are somewhat
daunting. In order to achieve a high degree of fracturing and blending of audio
and video, a large number of feedback agents needs to be simulated. This of
course conflicts with the desire to display very fluid and smooth fragment
motions, which requires high frame rates. The way texturing is handled also
puts a significant load on the system.
Textures are steadily updated based on new video input and therefore
need to be continuously transferred to the video card. At the moment, the video
tracking system also needs improvement since it is not very robust and requires
a very long background subtraction phase. The desire to combine life audio
capture and audio output obviously leads to feedback problems. By very careful
placement of the shotgun microphone and speakers, feedback can be mostly
eliminated. But in all exhibitions situations, during which we used speakers
for audio output, the spatial restrictions prevented such an optimal setting.
4. Conclusion and Outlook
Based on the feedback we have received so far we believe,
that MediaFlies has succeeded in providing an interesting and aesthetically
fascinating form of audiovisual feedback. This positive feedback was mostly
based on MediaFlies capability to coalesce and dissolve discrete and
recognizable visual and acoustic features within a constantly shifting stream
of seamlessly blended live and prerecorded media material. Interactivity on the
hand turned out to be somewhat problematic, as most visitors didn't realize
that their presence and movements affected MediaFlies behavior. This issue can
partially be attributed to the fact that MediaFlies, by it's very nature,
doesn't respond instantly and in an exactly reproducible manner to interaction.
Rather, synchronization and (to a much lesser degree) changes in flocking
behavior are somewhat slow processes, which only partially depend on
interactive input. It seems that most visitors are used to fairly reactive
installations, which exhibit immediate and obvious input-output
relationships. Nevertheless, we are
strongly convinced that autonomous and generative systems provide very
rewarding forms of interaction as soon as visitors adapt to more explorative
approaches in dealing with artworks.
We believe that the concept and current realization of
MediaFlies has sufficient potential to justify further development. Plans for
relatively short-term improvements concern MediaFlies methods of media
acquisition. In addition to live capture, we would like to implement some form
of automated media selection mechanism. This mechanism is intended to replace
either partially or entirely the current method of manually assigning audio-
and video-files for MediaFlies to work with. For example, MediaFlies may
autonomously select audio and video material from online or offline media
repositories by employing some sort of similarity calculation based on the
current life material. A second, more longterm extension of MediaFlies deals
with the relationship between agent behavior and media material. Currently, the
agents are entirely unaffected by the quality of the media material they
present. We would like to introduce a feedback mechanism between the visual and
acoustic output and the agents’ behaviors. By allowing agents to change their
behaviors depending on the media fragment, which they and their neighbors
present, novel forms of algorithmic media recomposition could be explored. One
possible way to achieve this could consist of letting the media material affect
some of the physical or behavioral properties of the agents. This effect can be
based on structural or semantic properties of the media material. Using such a
system, agents may for instance learn structural and statistical properties
present in one type of input media and try to reconstruct these properties when
presenting a different type of media.
4. References
[1] Sommerer, C., and Mignonneau, L. 2000. Modeling Complex
Systems for Interactive Art. In Applied Complexity - From Neural Nets to Managed
Landscapes, 25-38. Institute for Crop & Food Research, Christchurch, New
Zealand.
[2] Reynolds, R. W. 1987. Flocks, herds, and schools: A
distributed behavioral model. Computer Graphics, 21(4):25-34.
[3] Ramos, V, Moura, L. and Pereira, H. G. 2003. ARTsBot –
Artistic Swarm Robots Project. http://alfa.ist.utl.pt/~cvrm/staff/vramos/Artsbot.html
[4] Blackwell, T. 2003. Swarm music: improvised music with
multi-swarms. Artificial Intelligence and the Simulation of Behaviour,
University of Wales.
[5] Blackwell, T. and Jefferies, J. 2005 . Swarm Tech-Tiles
Tim. EvoWorkshops, 468-477.
[6] Blackwell, T. and Young, M. 2004. Swarm Granulator.
EvoWorkshops, 399-408.
[7] Unemi, T. and Bisig, D. 2004. Playing music by
conducting BOID agents. Proceedings of the Ninth International Conference on
Artificial Life IX, 546 - 550. Boston, USA.
[8] Unemi, T. and Bisig, D. 2005. Music by Interaction among
Two Flocking Species and Human. Proceedings of the Third International
Conference on Generative Systems in Electronic Arts, 171-179. Melbourne,
Australia.
[9] Unemi T. and Bisig D. 2005 . Flocking Orchestra.
Proceedings of the 8th Generative Art Conference. Milano, Italy.
[10] Boyd, J.E., Hushlak, G., and Jacob, C.J. 2004,
SwarmArt: interactive art from swarm intelligence. Proceedings of the 12th
annual ACM international conference on Multimedia. 628-635. New York, NY, USA.
[11] Shiffman, D. 2004. swarm. Emerging Technologies
Exhibition. Siggraph, Los Angeles, LA, USA.
[12] R. Beninca, 2001, Implementing Real-Time Granular
Synthesis. To appear in K. Greenebaum and R. Barzel (Eds.), Audio Anecdotes
III, A. K. Peters, Ltd.