New methods for
the three-dimensional representation
of
high-dimensional objects
Philip Van Loocke
Abstract. The paper develops new methods for the
visualization of high-dimensional objects. An algorithm minimizing different
kinds of error functions is described. The contrast between metric and
structural adequacy is illustrated. Aesthetic representations of hypercubes are
obtained in the metric domain if different types of structure are integrated,
and in the structural domain when spatially bifurcating curve sets are taken as
a point of departure. Then, a weighted sum of vertex-based transforms is
associated with the visualization of a hypercube. These transforms construct
map from Rn onto R3 on basis of the visualization of a
hypercube. This is illustrated for four-dimensional objects generated by a
function familiar from fractal contexts.
1. Introduction
The question how high-dimensional structures can be visualized in three dimensions has been raised since the advent of non-Euclidean geometry and of modern physics (Kaku, 1994; Barrow, 2003), and has inspired several artists (Henderson, 1983). Toward the end of the nineteenth century, knowledge about the conceivability of a fourth dimension spread, among others, in England and in France. From about 1910, cubist art was often explained as a means for the artist of expressing a four-dimensional reality. Artists such as Duchamp explicitly tried to develop new methods for visualizing the fourth dimension. They embedded their practice in a more global philosophical view on a four-dimensional universe. It was influenced by Russian authors and artists (such as Ouspensky and Malevitch), who linked four-dimensional concepts with a mystical attitude, which was linked with platonism. In the United States, ideas about higher dimensions widely spread through literature, such as the science fiction of Wells. Through the work of Bragdon, four-dimensional concepts found their way to the design of ornaments. In the twenties, Buckminster Fuller brought these ideas into the field of architecture. But although there are notable exceptions, the four-dimensionalist artistic/philosophical inspiration and interest faded after 1920.
In the past few decades, this interest gradually re-emerged, because computer technology gave new opportunities for visualizing high-dimensional objects. Popular work on computer graphics, like the book of Banchoff (Banchoff, 1990), brought these possibilities under wider attention. Digital architecture included the concept of higher dimensions in its design process, such as in the work of Novak or Lalvani (Lalvani, 2003).
In this paper, new methods for obtaining computer generated visualizations of high-dimensional objects are constructed. In section 2, a stepwise algorithm for visualizations of n-dimensional hypercubes is explored. The algorithm is run for metric constraints, and for structural constraints that are cast in metric terms (section 2). Subsequently, the algorithm is reformulated in terms of branching structures. This yields representations in which different types of three-dimensional spatial structures are combined. Section 3 comments on the difficulty of reconciling structure and metric in the representation of high-dimensional objects. As an alternative to a stepwise procedure, section 4 describes a structural approach that generates forms of a more organic nature. Finally, section 5 describes how the visualizations of hypercubes can serve as a basis for a transform of the entire space Rn onto R3. The transform is illustrated with visualizations of some four-dimensional structures defined in quaternion space.
2. A stepwise algorithm for two and three dimensional visualizations
of hypercubes
Consider a hypercube in n dimensions. It has 2n edge points or ‘vertices’, which are denoted Pi. Suppose that the hypercube is mapped on a two- or three-dimensional visualization. The point on which Pi is mapped is denoted Qi. The vertices Pi are supposed to have coordinates equal to –1 or +1. The coordinates of Qi take continuous values and are adapted in the course of the stepwise algorithm.
Suppose that the coordinates of Qi are initialized randomly. The Euclidean distance d(Qi,Qj) for all couples of points (Qi,Qj) is determined, and this quantity is normalized by division by the largest value found for it: d*(Qi,Qj)=d(Qi,Qj)/dmax, where dmax is the maximal distance between points Qi and Qj. Similarly, in the hypercube, all n-dimensional Euclidean distances d(Pi,Pj) between edge points are determined, and normalized by division by 2.n(1/2): d*(Pi,Pj)=d(Pi,Pj)/ 2.n(1/2) (for the given choice of coordinates, 2.n(1/2) is the largest distance between different edge points in the hypercube). Then, the error measure E1 = S{i,j=1,…,n} (d*(Qi,Qj)-d*(Pi,Pj))2 can be used to measure the metric resemblance between the hypercube and its visualization. It is proportional to a measure known as ‘stress’ or ‘Sammon error’ in the literature on data visualization.
A stepwise algorithm minimizing this error can be defined as follows. The points Qi are give random initialization. At each step, one point Qj and one dimension in the visualization are selected randomly. The quality e.a is added to the coordinate of Qj along this dimension; e is the stepsize of the algorithm, and a is a random number between –1 and +1. If the new coordinates of Qj lead to a lower value of E1, the change in coordinates is kept; else, the old coordinate values are restored. Different runs of this algorithm generally yield different visualizations, though the final value of E1 is often the same. Figure 1 shows a two-dimensional visualization of a three-dimensional cube (with E1=1.904); Figure 2 illustrates a two-dimensional visualization of a four-dimensional cube (with E1=11.946).
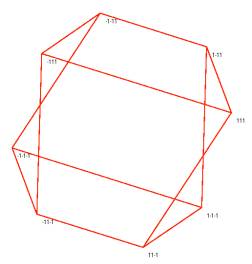
Figure 1. Two-dimensional visualization of a cube by minimization of E1
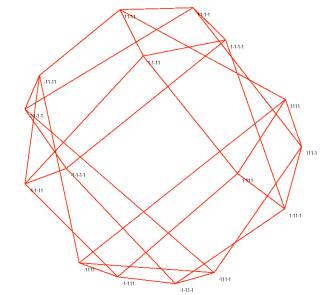
Figure 2. Two-dimensional visualization of a hypercube with n=4 and for minimization of E1
The visualization of the hypercube in Figure 2 lacks symmetry. Symmetry is restored when the algorithm is applied for three dimensional visualizations. This is illustrated in Figure 3, where two representations corresponding to n=4 are shown (in both cases, E1=3.769). The visualizations obtained show point-symmetry relative to the center of the Qi-structure. The left and the right part of Figure 4 show a representation of a five, respectively a six-dimensional hypercube (with E1=24.102 and E1=120.378). The point-symmetry of the visualization remains for n=5 and n=6.
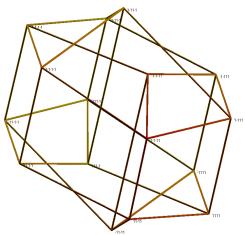
Figure 3. Two visualizations of
hypercubes for n=4 and for minimization of E1
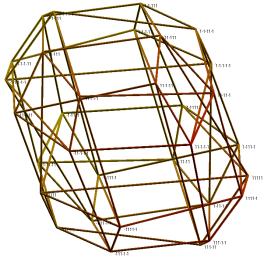
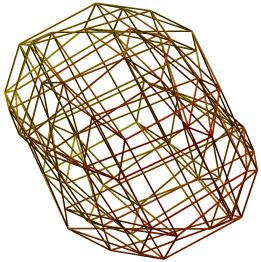
Figure 4. Visualizations of hypercubes for n=5 (left) and n=6 (right)
Consider the smallest squares on the surface of the hypercube. These
squares are determined by edge points {Pi1,…,Pi4} for
which n–2 coordinates take the same value, and for which the remaining two
coordinates form the four combinations (–1, –1), (–1,+1), (+1, –1) and (–1,+1).
The number of such squares is equal to s(n) = 2n-2. B(n, n–2), where
B denotes the binomial value. Similarly, the smallest 3-dimensional cubes are
formed by sets of different edge points {Pi1,…,Pi8} which
have the same value along one dimension. The number of such cubes in the
hypercube is c(n) = 2n-3. B(n, n – 3).
The four edge points of a smallest square define (42 – 4)/2 = 6 different distances. For the j-th smallest square, the k-th distance between edge points is denoted dsjk. Similarly, for every smallest cube, the eight edge points define (82 – 8)/2 = 28 distances; dcjk is the k-th distance relation associated with the j-th cube. The largest distance that occurs in a smallest square is 2(1/2); in case of a cube, the corresponding value is 3(1/2). Similar distances can be determined also for the images Qi of the edge points Pi in the visualization. Suppose that d’sjk is the k-th distance between the points in {Qj1,…,Qj4} on which the square {Pj1,…,Pj4} is mapped. Similarly, d’cjk is the k-th distance between points on which the edge points of the j-th smallest cube are mapped. The largest distance in d’sjk (k=1,…,6), respectively d’cjk (k=1,…,28), is denoted d’sj,max, respectively d’cj,max. With these notations, two additional error functions can be defined:
E2= S{j=1 to s(n)} S{k=1 to 6} (dsjk/2(1/2) – d’sjk / d’sj,max )2
E3= S{j=1 to c(n)} S{k=1 to 28} (dcjk/3(1/2) – d’cjk / d’cj,max )2
Error function E2 measures how well smallest squares in a hypercube are mapped on squares in the visualization. E3 measures how well the visualization preserves distance relations for smallest cubes. Figure 5 shows two examples of two-dimensional solutions found for minimization of E2 and for n=3 (and with E2=12.618 and E2=8.657). For n=3, E3 coincides with E2. Figure 6 shows a visualization of a hypercube with n=4 and for minimization of E2 (E2=22.952). In Figure 7, E3 is minimized (E3=21.661). Three-dimensional visualizations are shown in Figures 8-11. Figure 8 has two examples of visualizations for n=4 and minimization of E2 (E2=12.394 and E2=12.200). Figure 9 shows two examples for minimization of E3 (E3=12.629 and E3= 12.618). The left, respectively the right, form in Figure 10 gives a visualization for n=5 and minimization of E2, respectively E3 (E2=53.965 and E3=80.735). Finally, in Figure 11, the left, respectively the right part, illustrates the case n=6 for minimization of E2, respectively E3 (E2=173.245 and E3=365.124).
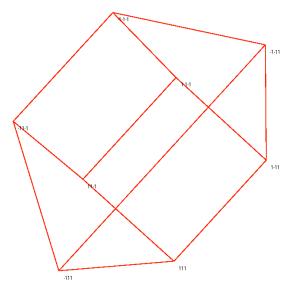
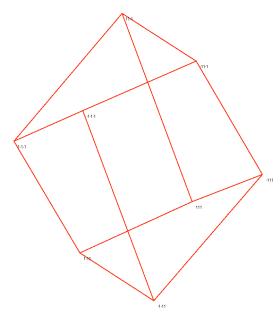
Figure 5. Two visualizations for cubes obtained by minimization of E2
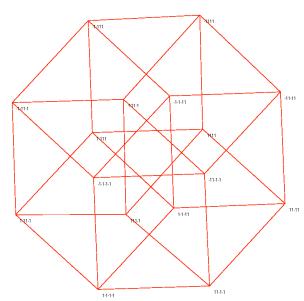
Figure 6. Two-dimensional visualization of a hypercube for minimization of E2
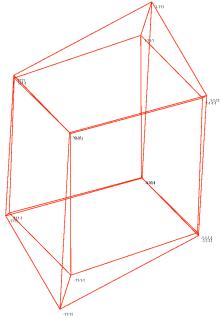
Figure 7. Two-dimensional visualization of a hypercube for minimization of E3
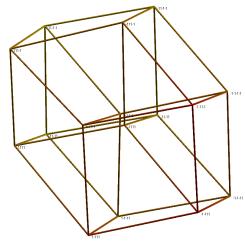

Figure 8. Three-dimensional
visualization of the hypercube for n=4 and minimization of E2 .
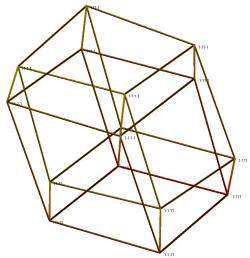
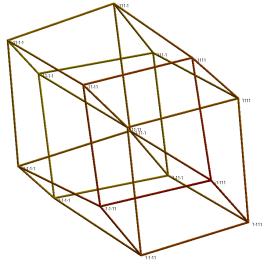
Figure 9. Visualization of the hypercube for n=4 and minimization of E3
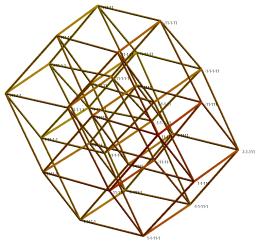
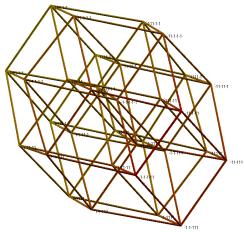
Figure 10. Visualization for n=5 and minimization of E2 (left) and E3 (right)
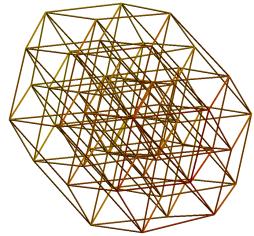
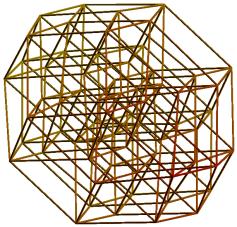
Figure 11. Visualization for n=6 and minimization of E2 (left) and E3 (right)
3. Angular variables corresponding to a branching process
In the previous section, the search algorithm varied Cartesian coordinates of edge points Qi. For a different choice of variables, the points Qi can be obtained by a spatial branching process consisting of n subsequent bifurcations. At the first stage of the bifurcation process, two branches with starting point in the origin are defined. The endpoint of a branch is the starting point for two new branches at the next level, until, at stage n, 2n endpoints are generated. Each branch is characterized by two angles f and q, and by a length l, where f is the angle between the horizontal projection of the branch and the x-axis, and q is the angle between the branch and the z-axis. The angles f and q can be adapted by the stepwise algorithm of the previous section, for any of the functions E1, E2 or E3. This yields a system with 2. (2+…+ 2n) angular parameters. In the examples in Figures 12-13, branches were given length inversely decreasing with the branching level.
The configuration to which the branching system converges lacks symmetry, but the endpoints of the branches have point-symmetry. This accords with the fact that the value of E1 in these examples approximates the values found in section 2 (in Figure 12, E1=3.801, and in Figure 13, E1=24.503). The algorithm can be run for symmetrically constrained branching systems. In this case, half of the tree is constructed as a point-mirror of the other half, and the total number of parameters is divided by 2. Then, solutions with higher E1-values are obtained. This is illustrated in Figures 14-15, where symmetry was imposed, resulting in E1-values 10.757, 12.624 (Figure 14) and 65.002, 48.916 (Figure 15). The illustrations are for branches of constant length (except for the first two branches, which were given shorter length).
These visualizations of hypercubes have a special aesthetic property. The tree-structure in itself has no clear interpretation to an observer not informed about its purpose. In Figures 14-15, the visualization of the hypercube, when drawn apart from the underlying tree-structure, is also of limited appeal (since the E1-value is relatively high, the fact that a hypercube is being visualized is not apparent). But by matching the tree-structure with the with the visualization of the hypercube, each type of three-dimensional structure can be interpreted with help of the other.
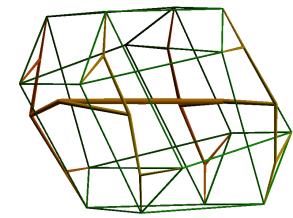
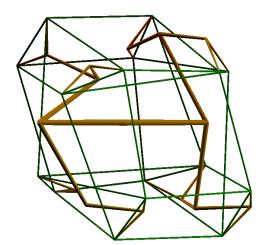
Figure 12. Two examples for angular variables and with branches of decreasing length
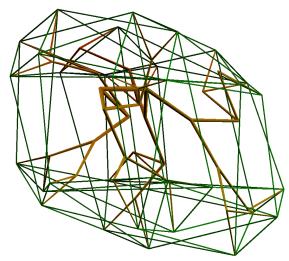
Figure 13. Visualization of the five-dimensional hypercube for angular variables
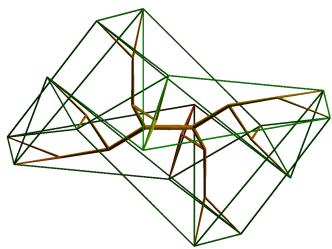
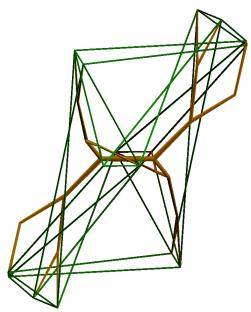
Figure 14. Visualizations of hypercubes with point symmetry imposed
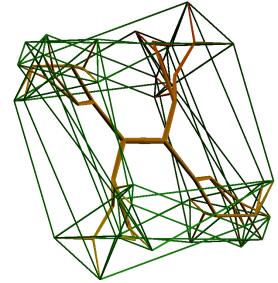
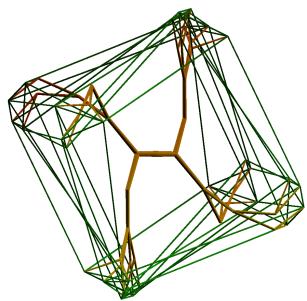
Figure 15. Visualizations of hypercubes (n=5) with point symmetry imposed
The branching algorithm can be run in a sequential way. First, a visualization for n=2 (corresponding to the visualization of a square) is computed. The 23 additional branches required for the visualization of the cube (corresponding to n=3) are attached at the endpoints of the branches corresponding to n=2. During the search corresponding to n=3, the latter are kept fixed. This process is continued. At the k-th step, the angles associated with the 2k new branches are allowed to vary. This results in a fast algorithm when compared to a non-sequential procedure. Such an algorithm was run several times. Branching structures with systematicity were never found, in the sense that angles between branches at later stages were not related in any systematic way to angles between branches at previous stages. This was not helped if different dimensions were given different weight in the metric function. Suppose that the coordinates of Pi, respectively Qi, are denoted xik (k=1,…,n), respectively yik (k=1,2 or k=1,2,3). In Figure 16, the error function E’1 = S{i,j=1 to N} (dn(Pi,Pj)/dmax – d3(Qi,Qj)/d’max)2, with dn(Pi,Pj) = (S{k=1 to n} ((1/k).(xik–xjk)) 2) (1/2) and d3(Qi,Qj) = (S{k=1 to 3} ((1/k).(yik–yjk))2)(1/2) was used. As a consequence, each additional dimension led to a smaller deformation of the metric relations obtained at a previous stage.
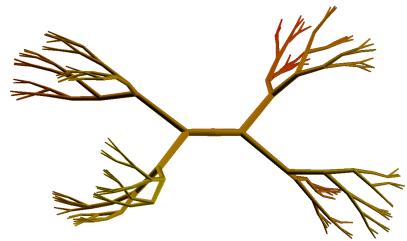
Figure 16. Tree-visualization for n=7 and with E’1 = 126.390
The lack of systematicity limits the aesthetics of the branching forms. Structural properties appear to be hard to reconcile with metric constraints, and this difficulty increases as n increases. For values of n higher than 6, representations which are visually accessible, or which have aesthetic symmetry, can still be obtained if the metric procedure is replaced by structural considerations.
4. Structural visualizations of high-dimensional discrete spaces
The spatial branching process used in section 3 can be generalized into an alternative visualization procedure based on structural considerations. As a point of departure, a rectangular parallelepiped is constructed with sides b.g, b.g2 and b.g3 (g<1). This structure is turned into a visualization of four-dimensional hypercube by splitting the smallest side-surfaces into two smaller rectangles with sides b.g4 and b.g5 (see Figure 17). Then, the new rectangles split again in two smaller rectangles to yield a representation of a five-dimensional hypercube, and so on. For splitting processes with appropriate structural properties, aesthetic representations result.
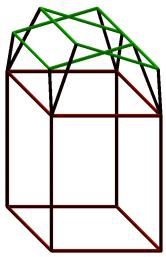
Figure 17. Splitting the upper side-surface of a rectangular parallelepiped
An instance of a splitting process is defined as follows. We confine the definition to the splitting process at the top rectangle of the cube (so that half of the visualization of the hypercube is generated; the other half is obtained by mirroring the resulting structure relative to the horizontal plane).
The first three binary dimensions of the n-hypercube are associated with the edges of the parallelepiped. Then, two curves are constructed, corresponding with fourth component values +1 and –1, respectively. The curves are defined as successions of t line segments. The starting point of the curves is the middle of the upper rectangle of the parallelepiped. The angles j and q of the segments linearly increment according to the rule: dj=c.x4 and dq=d.x4, where x4 is the fourth component value associated with a curve. The new rectangles are attached on top of these curves. They are obtained by scaling the top-surface of the parallelepiped, and are orthogonal to the segment on top of which they are drawn. The length of a line segment in a curve is multiplied with a factor z (z <1) at each step, so that the bifurcating curve structure has smaller branches after each new bifurcation.
After the rectangles corresponding to the fourth dimension are drawn, each of the curves splits into two new curves. The change in angles of the segments in the curves remains determined by dq = c.xk and dq = d.xk (k³5). This process is continued until k equals n. In order to allow endpoints to be located in different horizontal planes, at each odd step in the bifurcation process, the value of q is increased by an amount k at the initial segment corresponding to xk = 1 if x4 = 1, and at the initial segment corresponding to xk = -1 if x4 = -1. In order to prevent the branching structure from curling too strongly onto itself, the parameter k is defined as a decreasing function of k. More specific, in the illustrations in Figures 18-19, k=kc(n+1-k)2. Figure 18 shows the upper part of the visualization of a 13-dimensional hypercube for c=0.0175, d=0.0175, z=0.993, and kc=0.125. Figure 19 shows the underlying curve structure for variation of one parameter in the construction (d=0.0105). Figure 19 was drawn with continuous circular contours in order to ease visual track of the bifurcation process.
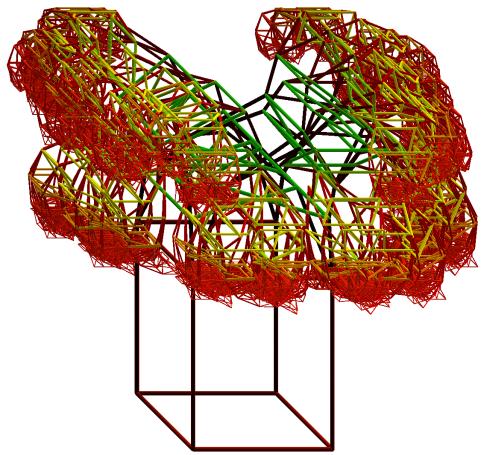
Figure 18. Upper part of a structural visualization of the thirteen dimensional hypercube

Figure 19. Example of an underlying bifurcating curve set
The aesthetics of bifurcating curve sets can be studied in its own right. For different parameters, and for a constant value of k, a binary tree corresponding to ten bifurcations is shown in Figure 20. The end-points of this structure are associated with a binary, ten-dimensional space. The procedure can be defined for p-ary spaces. The nature of the curve sets generated can be made more general also by giving the rules for dj and dq a more general form. This is illustrated for a ternary space, and for which xk can take values –1, 0 and +1 in Figures 21-25 (k=1,…n; since we only illustrate the branching curve structure, k can start at value 1 instead of at value 4). Suppose that dj and dq are defined in accordance with dj = c.f(j,q).xk and dq = d.g(j,q).xk (c and d are constants; also k is kept constant in the illustrations which follow). If f and g are well chosen, end-points of branches develop in non-co-planar ways and with aesthetic spatial symmetry. The parameters and functions in these rules can be tuned toward a visually accessible representation of a p-ary space, or toward representations of aesthetic interest.
The definition of f and g is facilitated if the angles j and q are drawn into the interval [0,p/2]. Two angles µ and n are considered; µ is obtained from j by subtracting iteratively p/2 from Abs(j) until a number in [0,p/2] is obtained; n is obtained in the same way on basis of q. Then, the form in Figure 21 is obtained for f=-µ and g=n (Figures 21-24 show branching structures with endpoints corresponding to the points of a seven-dimensional ternary space). The form in Figure 22 results with f=µ2 and g=1-n. Figure 23 is obtained for f=8µ(1/2) and g=-n(1/2) . Figure 24 corresponds f=µ4 and g=µ4. Figure 25 is made for a ternary eight-dimensional space and for f(m)=-m1/2, and g(n)=8n1/2.
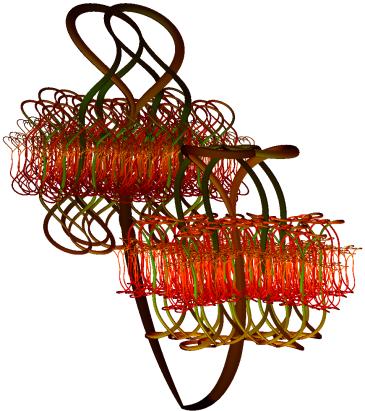
Figure 20. Form associated with a space of ten binary
dimensions
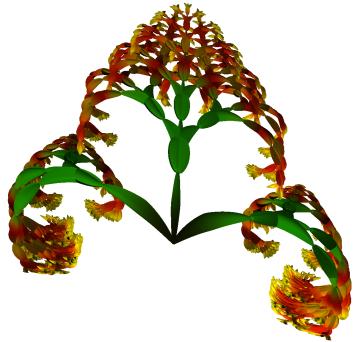
Figure 21. Form with f=-µ and g=n

Figure 22. Form with f=µ2 and g=1-n

Figure 23. Form with f=8µ(1/2) and g=-n(1/2)
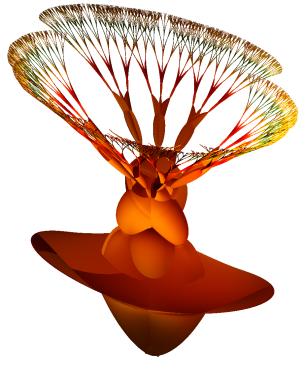
Figure 24. Form with f=µ4 and g=µ4

Figure 25. Form corresponding to an eight-dimensional ternary space
In Figures 20-25, the curve-structure was enveloped with non-circular volumetric elements. For each curve, circles were drawn around the end-points of all line segments, and orthogonal to the curve. In case of a ternary space, for each line segment, there are two corresponding segments on alternative curve-continuations and which belong to the same stage in the bifurcation process. An enveloping circle was elongated in the direction of these alternative continuations. The resulting contours were connected by lines.
5. Transforms constructed as weighted vertex-based functions
The previous section aimed to obtain visualizations for high-dimensional spaces by exploration of the structural instead of the metric domain. This section returns to the metric visualizations of section 2. Instead of visualizing hypercubes, a general transform F: Rn ® R3 is described which visualizes arbitrary high-dimensional objects. The transform takes a
visualization of the hypercube as its point of departure, and maps a point in Rn on a point in R3 as a function of its metric and angular relations with the vertices (or ‘edge points’) and the edges (or ‘side-lines’) of the hypercube. The visualizations obtained by the algorithm of section 2 generally do not correspond to linear projections of the hypercube. Therefore, the function F which embeds objects in the visualization is also not linear, although usually only ‘weakly’ so.
The transform F is defined as a weighted sum of angular vertex-based transforms. With each vertex of a hypercube, an angular vertex-based transform fk(x) is associated as follows (k=1,…,2n). The unit vector originating in the center of the hypercube and pointing to the k-th edge point is denoted ek (k=1,…,N). The components of ek are equal to 1/n(1/2) or –1/n(1/2). The unit vector pointing from Qk to Qr in the visualization is denoted vkr. With these notations, fk: Rn ® R3 associated with vertex Pk is defined as follows:
fk(x) = Qk + s. |x–Pk| . (S{r=1,...,N; r¹k} (er. (x–Pk)/ |x–Pk| ) . vkr) / c
with:
c= | S{r=1,...,N; r¹k} (er. (x–Pk)/ |x–Pk| ) . vkr |
The function fk(x) contains a distance factor |x-Pk| and a directional factor (S{r=1,...,N} (er. (x–Pk)/ |x–Pk| ) . vkr) / c. Due to the normalization, the directional factor specifies a unit vector in R3. The distance factor entails that the distance between fk (x) and Qk in R3 is s times the distance between x and Pk in Rn, from which it follows that fk(Pk)=Qk.
Figure 26 illustrates an edge-based transform for n=4 and for the point Q1 in the Qk-structure in the first form in Figure 8. The Figure shows the transform of a 12x12 grid defined over the four-dimensional hypercube. All points on the grid were transformed according to f1(x) (with s=1.05. a/b, where a is the average distance between edges in the Pk-hypercube, and b is the average distance between different points Qk). It can be observed that, in the neighborhood of Q1, the transformed grid approximates a linear grid structure coinciding with planes through Q1 and the neighbors with which it forms a smallest square. The quality of the approximation decreases for points which are images of points removed from P1 in the hypercube.

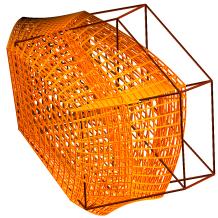
Figure 26. Vertex-based transform operating on the side-planes of a four-dimensional hypercube containing Q1. The left figure shows the transforms of the side-squares containing Q1. The right figure shows the transform of the entire side-square structure.
A good approximation of an overall linear structure over the Qi-structure is obtained if vertex based transforms for all points Pi are summed into a weighted combination. The function F is obtained if a transform fk is given a weight proportional to a power r of the inverse distance between x and Pk:
F(x) = (1/c). S{k=1 to N} fk(x) / |x-Pk|r
with
c= S{k=1 to N} 1 / |x-Pk|r
Figure 27 shows the result of F(x) when applied to the same Qk-structure as in Figure 26. It can be noticed that the voted sum turns local approximations into global approximations (the Figure was generated for r=1; this property remains for other visualizations of the hypercube, and for values of n higher than 4; a study of this fact was carried out in Van Loocke, 2003).
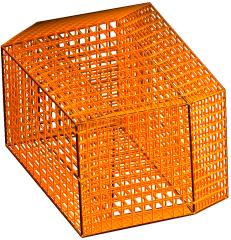
Figure 27. F(x) operating on the side-squares of the hypercube
The function F(x) can be used to obtain visualizations of any n-dimensional form. In Figures 28-33, it was applied on a generalization of a function familiar in a fractal context.
Suppose that a four-dimensional point x has coordinates x1,…,x4. Then, the quaternion expression f(x)=x2+c has four components f1,…,f4 which are defined by f1(x)=x12-x22-x32-x42+c1, f2(x)=2x12x22+c2, f3(x)=2x12x32+c3, f4(x)=2x12x42+c4. The following procedure defines a function g(x). First, f(x) is iterated t1 times. The result of this function, but with the first component transformed in its negative, is used as input for t2 additional iterations of f, after which the first component is changed into its negative again. The resulting point is uniformly contracted toward the origin, except for the first coordinate, which is displaced by an amount a. This cycle of t1+t2 iterations is repeated t3 times. The resulting point is g(t1,t2,t3;x). In Figures 28-33, gg(t1,t2,t3;x) was applied to a square 27x27-grid defined over a structure defined over the four-dimensional hypercube which was contracted uniformly to the origin by a factor h. In Figure 28, h =0.333, t1=2, t2=1 and t3=3. In Figure 29, the same parameters are used, but F is applied on basis of a different visualization of the hypercube. In the next Figures, these parameters were h =0.333, t1=3, t2=2 and t3=3 (Figure 30); h =0.333, t1=3, t2=4 and t3=3.(Figure 31); h =0.333, t1=5,t2=4 and t3=4 (Figure 32); h =0.0121, t1=5, t2=5 and t3=6 (Figure 33); h =0.0121, t1=5, t2=5 and t3=8 (Figure 34).
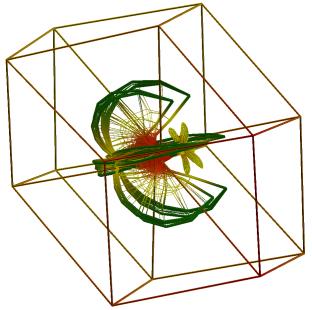
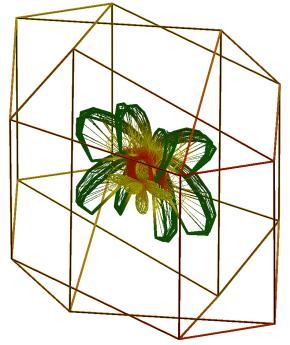
Figure 28 (left) and Figure 29 (right)
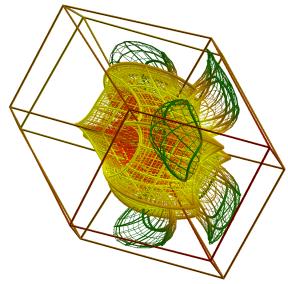
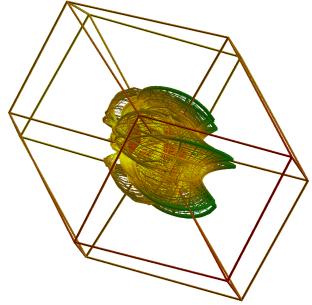
Figure 30 (left) and Figure 31 (right)
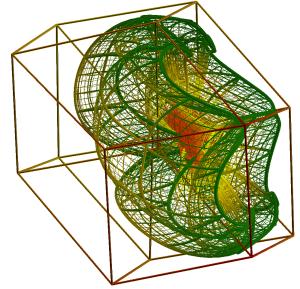
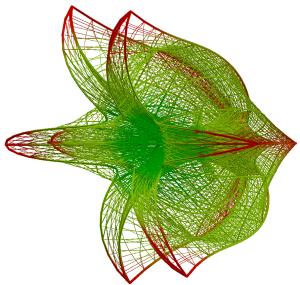
Figure 32 (left) and Figure 33 (right)
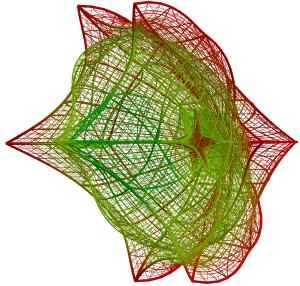
Figure 34 (left) and Figure 35 (right)
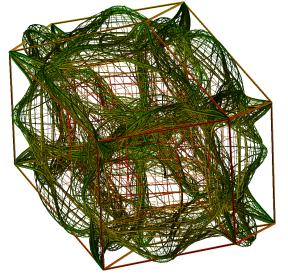
Figure 34 (left) and Figure 35 (right)
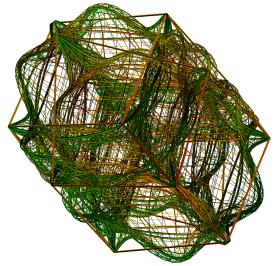
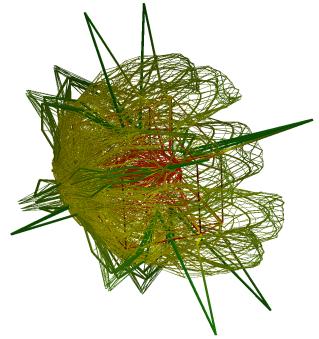
Figure 36 (left) and Figure 37 (right)
Variations of F(x) can be obtained in several ways. In Figures 35-36, F(x) was applied
on the side grid over the hypercube, but for functions fk(x) in
which the factor s|x-Pk| was replaced with s|x-Pk|.(1+sin(5|x-Pk|)).
In Figure 37, this strongly non-linear transform was used to map the side grid
after it had been transformed by the procedure used in 28-34, and for h=0.4, t1=1,
t2=1 and t3=4.
6. Conclusion
The paper considered visualizations of high-dimensional objects. As a point of departure, visualizations were used which came out of stepwise algorithms. The tension between metric accuracy and desirable structural properties was discussed. In section 5, a non-linear projection method was developed to obtain visualizations of high-dimensional objects matched in the visualization of a hypercube. In other work, the latter method was applied to data-visualization and was compared with principal component analysis, which corresponds to the selection of a well-chosen linear projection. It was pointed out that, for different real-world data-sets, the metric accuracy of a visualization based on the non-linear transformation F was better than the metric accuracy of principal component analysis (Van Loocke, 2003). This is part of the motivation for using F instead of linear projections in section 5.
References
Banchoff, T. (1990), Beyond the third dimension, New York: Scientific American Library
Barrow, J. (2003), The constants of nature, from alpha to omega, Pantheon Books
Henderson, L. (1983), The fourth dimension and non-Euclidean geometry in modern art, Princeton University Press
Kaku, M. (1994), Hyperspace. A scientific odyssey through parallel universes, time warps and the tenth dimension, Oxford University Press
Lalvani, H. (2003), Genomic Architecture. In (Eds. Gans, D. and Kuz, Z.) The Organic Approach to Architecture, Chichester: Wiley Academy, pp.115-126.
Van Loocke, Ph. (2003), Application of weighted vertex-based transforms to data visualization (submitted)