Symbolic organic
design
Philip Van Loocke
Art and Consciousness Studies, University of Ghent,
Belgium
e-mail:
philip.vanloocke@ugent.be
Abstract
We propose a method for
organic construction in which hypercube visualizations are grown by trees. The
growth process corresponds to stochastic gradient descent on a
multi-dimensional scaling error surface. The local minima of the surface
correspond to trees which are bent in such a way that their endpoints define
hypercube visualizations. The surface has much more local minima corresponding
to solutions of different visual appearance than dimensional scaling based on
variation of coordinates, which is an advantage from the artist point of view.
Additional constraints are included in the error function in order to increase
the design relevance of the local minima. The method proposed includes symbols,
such a hypercubes, in organic design. From this perspective, it is
complementary to approaches which include visual elements from the environment
in generative design.
1. Introduction
The hypercube is a symbol for
one of the fundamental properties of our universe; for this reason it has
attracted many artists in the course of the past century [1]. In the past few
decades, computer graphics further enhanced the interest in visualizations of
high dimensional structures. After the pioneering work of Banchoff [2], artists
like Robbin gave visualizations of hypercubes a prominent place in their work
[3]. These days, visualizations of four-dimensional polyhedra are used at many
congresses to illustrate the link between mathematics and art. With the advent
of 3D-printers, high dimensional structures have been used to generate
three-dimensional art (see for instance the work of Bathsheba Grossman [4]).
This paper aims to hint at the possible use of such concepts in a context of
organic architecture.
In the work which is
described below, the hypercube symbol takes a central place. It is grown by
trees which are ‘symbolic’ too in the sense that they are not copied from real
trees in nature. This symbol-oriented approach to design is complementary, for
instance, to Soddu’s work in organic architecture [5]. In the latter, organic
constructions are realized by genetically recombining elements taken from the
real, visual environment. Here, we modify the code of plants so that they
express symbols, which are in people’s minds, instead of in their physical
environment.
2. Multi-dimensional scaling
in a tree based parameter space
Multi-dimensional scaling is
one of the core ingredients of our method. It is an algorithm that searches for
representations of high-dimensional objects which are metrically as accurate as
possible. Consider a four-dimensional
hypercube. Suppose that its sixteen vertices Pr have coordinates pr,i,
with r=1,…,16; i=1,…,4. The Euclidean distance between the r-th and the s-th
vertex is dr,s= (Si=1,…,4 (pr,i–ps,i)2)
(1/2). Suppose that dmax is the largest distance between
vertices. In order to apply MDS, all four-dimensional distances are normalized
by division by dmax.
Consider a three-dimensional
visualization of this hypercube. Suppose that the vertices in the visualization
are denoted Qr, and that their coordinates are qr,j, with
r=1,…,16; j=1,…,3. The Euclidean distance between the three-dimensional
representations of the r-th and the s-th vertex is d’r,s = (Sj=1,…,3
(qr,j–qs,j)2) (1/2). Also here, all
distances are normalized by division by the largest distance d’max.
Then, the MDS error function E1=Sr=1,…16,s=1,…16 (dr,s–d’r,s)2
quantifies the difference between the metrical relations in the
three-dimensional visualization and the metrical relations in the
four-dimensional object.
MDS starts with a random
initialization of the points Qr. The value of E1 which is
associated with this initialization is calculated. Then, a stochastic algorithm
is used in order to incrementally minimize E1. At each time step,
small variations of randomly selected coordinates qr,j are
considered. If the variations led to a lower value of E1, the new
coordinates are kept; else, the old values are restored. For this procedure,
the lowest value of E1 that we obtained was E1 = 3.769.
Figure 1 illustrates a visualization which corresponds to this value. We notice
that the solutions found by MDS are not linear projections of the
four-dimensional hypercube on a three-dimensional subspace. This is illustrated
by the fact that the edges (or ‘side squares’) in the visualization are not
perfectly plane structures (see for instance the upper left part of Figure 6c
below; since edges are not flat surfaces, their intersections can be curved instead
of straight lines).
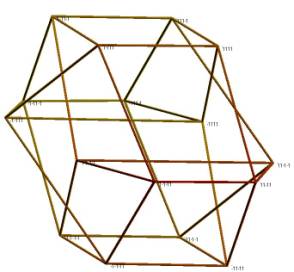
Figure 1. Hypercube visualization corresponding to a
local minimum of E1
We also worked with a second
error function E2, which expresses how well the eight side-cubes of
the hypercube can be recognized in the three-dimensional visualization. Each
side-cube is defined by eight vertices. For each side cube, the distances dk,r,s
between pairs of vertices are calculated (k=1,..,8, r=1,…,8, s=1, ..8; the
index k refers to the side-cube; r and s refer to vertices which participate in
the k-th side-cube). The distances are normalized by division by the largest
distance which occurs in a side-cube. The same quantities are calculated for
the three-dimensional visualization, yielding distances d’k,r,s.
Then, E2 is given by E2= Sk=1,…8, r=1,…8, s=1,…8 (dk,r,s–d’k,r,s)2.
In visualizations which are based on this error function, cube-like features
are more easily detectable, at the expense of lower overall metrical
resemblance to the four-dimensional hypercube.
The second ingredient of the
present method is a particular type of three-dimensional tree. We apply MDS not
on coordinates of loose points, but on points which are attached to trees.
During the MDS search process, the location of the points is varied by bending
the trees, and by stretching its branches in a systematic way. A tree has a
starting point Q0. At this starting point, the first bifurcation
occurs: two branches split off, with endpoints Q11 and Q12.
At both endpoints, two new branches appear. The endpoints of the new branches
are Q21, Q22, Q23 and
Q24. The branching process is iterated two more
times until, at the fourth level, 16 branches result with endpoints Q41
,…,Q416 (see Figure 2).

Figure 2. The structure of the tree. It is bent in three
dimensions until the endnodes coincide with the vertices of a hypercube
visualization.
The tree in Figure 2 is only
a schematic representation of the tree which we use. We use trees which we use
are curved in three dimensions. In
Figure 3, we give an example of a three dimensional tree which we used as an
initialization for the search process. In earlier work, we studied trees of
this type which were bent by fractal fields. In order to give an idea of the
type of visual representation that can be obtained in this way, we include a
further illustration in Figure 3. It shows the five highest levels of a ternary
tree with eight branching levels. The tree was initialized in such a way that
its endpoints coincided with points on the Sierpinski triangle. Then, a fractal
process was used to define the curvature of its branches (for a general
description of this method, we refer to [6-7]).
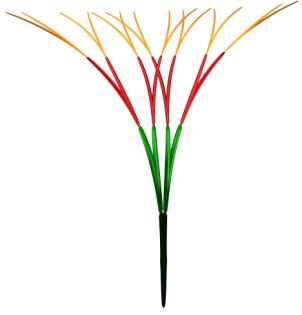
Figure 3. Initialization of the tree.
In this paper, we will not
bother the reader with a technically detailed description of the parameters
which are associated with a tree. In total, 42 continuous parameters are
associated with the curvatures of the line segments of which branches are
composed. These parameters are chosen in such a way that the symmetry in Figure
3 is only partially broken. For instance, the projections on the horizontal
plane of all branches of the same level with odd index have the same curvature.
A similar point holds for branches with even index. Also, the angles between
the z-axis and corresponding line segments of different branches of the same
level take the same value. The fact that symmetry is broken only partially is
important if we want to obtain representations of aesthetic quality. Four
additional parameters are associated with the length of the branches. At each
level, all branches with odd index are allowed to expand by the same amount.
All branches with even index are contracted by this amount. The total number of
parameters that is associated with a tree, and that is varied in the course of
the search process, is therefore equal to 46. This is comparable to the number
of parameters in an ordinary MDS algorithm. In the latter, each
three-dimensional point which represents a vertex is varied. Since such a point
has three coordinates, 16 x 3 = 48 parameters are subject to variation.
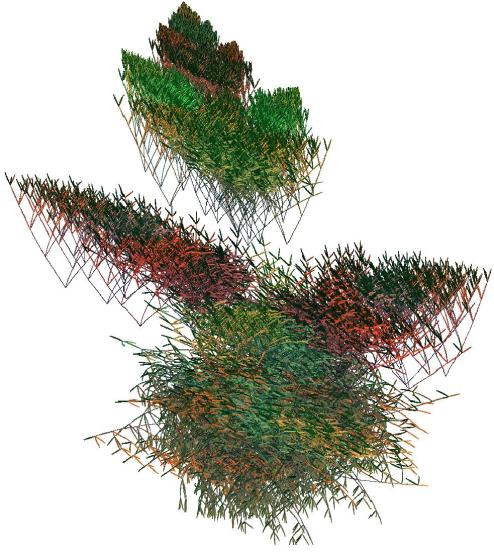
Figure 4. Example of a ternary tree with eight branching
levels (only the last five ones were included in the Figure)
Whether run on basis of error
function E1 or E2, the tree search algorithm is able to find
solutions with the same error value as ordinary MDS. It also often finds
solutions corresponding to local minima of higher error. Since these are
sometimes remarkable from an aesthetic point of view, for the computer artist
it is of relevance to explore also the latter. Due to the inclusion of the
trees, the number of local minima which correspond to different visualizations
is much larger for the present algorithm than for ordinary MDS.
In Figures 5a-b, we present
two solutions found by the search algorithm. The first Figure was obtained for
E1, the second for E2. They illustrate that the algorithm
sometimes converges to a relatively strongly bent tree. This can be encouraged
if the variations during the initial steps of the search process are allowed to
take large values. Though these representations are often remarkable, in most
illustrations which follow below, we have chosen trees which hide the hypercube
visualization to a lesser extent.
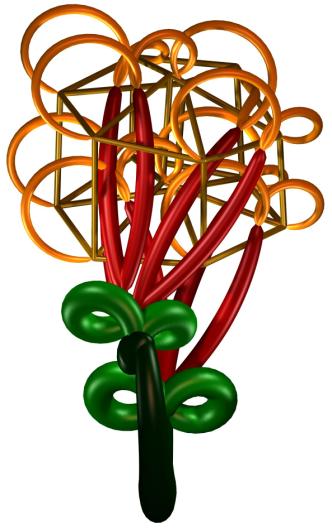
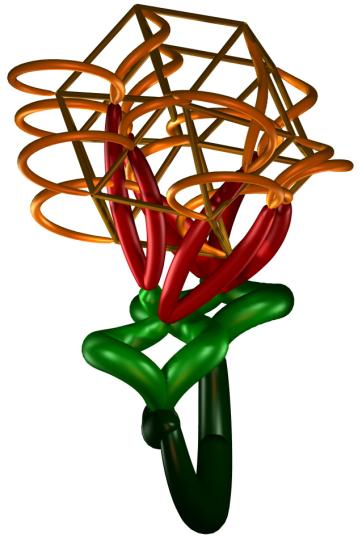
Figure 5 a-b.
Solutions obtained for E1 (Figure 5a) and E2 (Figure 5b)
The structure of a hypercube
visualization can be made clearer if we fill all or some of its 24 edges. We
implemented three methods to visualize edges. The first method covers edges
with a grid of some thickness. The second one covers the entire edge with a
surface. Third, half of the surface of an edge can be filled, which has the
advantage of still allowing partial visual access to the structure behind the
edge. We rendered our visualizations in Microstation. The options for visualizing
edges were put in different ‘levels’ of this software. This means that they
were included or excluded in the visualization with a single mouse click.
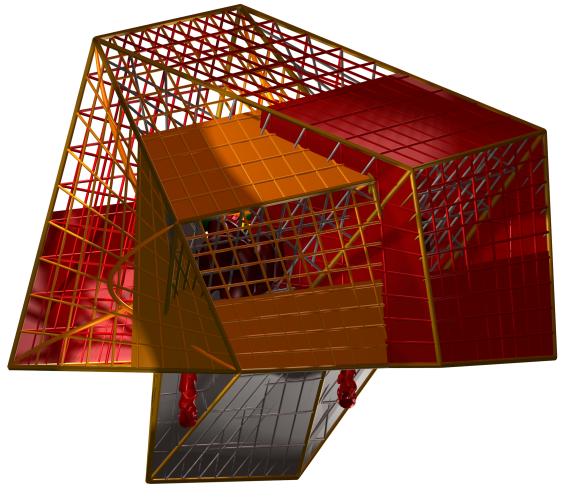
Figures 6a-e include five illustrations. The upper three were obtained by
stochastic gradient descent of the error surface defined by E1, the
lower two correspond to local minima of E2.
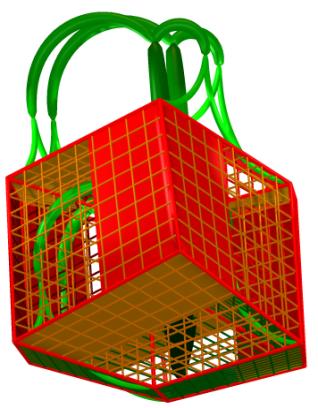
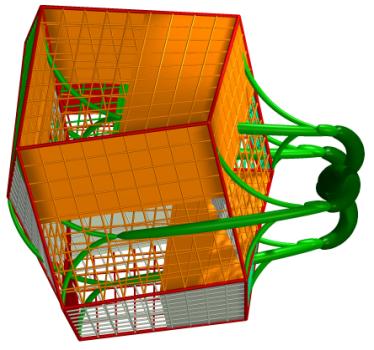
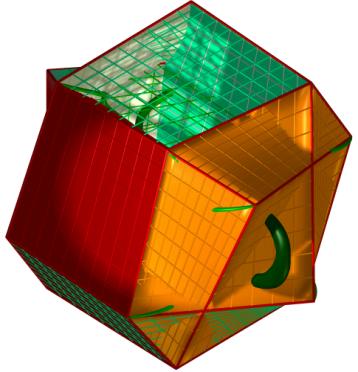

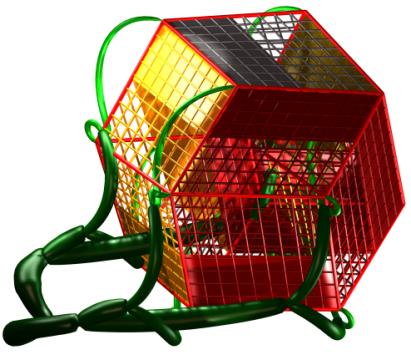
Figure 6a-e. Five examples of solutions. The upper three were obtained by
minimization of E1, the lower two by minimization of E2.
3. Constraints which increase
the design relevance of solutions
While contemplating forms
like in Figure 6c, we wondered if we could modify the error landscape in such a
way that the solutions would hint at organic architectural designs. For
instance, if the visualizations of the hypercubes have a relatively broad
horizontal basis, they have more stability from a constructive point of view.
Also, from this perspective, the tree has a more natural place if its starting
point belongs to the plane defined by this basis.
In order to include these
constraints in the search process, we selected six vertices in the hypercube
visualization. For each of the vertices, we calculated the distance to the
horizontal plane in which the starting point of the tree was located. The sum
of these distances was added as a penalty term to the error function. As a
result, the local minima of the new error function have a horizontal base in
which the visualizations of at least these six vertices are located, and which
has the same altitude as Q0. Trees were allowed to partially grow
below this plane. In some solutions, also part of the hypercube visualization
led to a ‘basement’ below this plane (see Figure 7a).
The search algorithm can be
modified also by changing the variables by which trees are characterized, or by
increasing the degrees of freedom for the curvature of the branches. In the
illustrations of the previous section, angular differences between successive
line segments of the same branch were required to take constant value. For the
illustrations for this section, we included eight more parameters which allow
branches to curl in more sophisticated ways. The inclusion of more parameters
entails that the error surface is defined over a space with more
dimensions. As a result, also the
number of local minima is further increased, which practically means that the
variety in shapes produced by the search process increases too. We include
eight illustrations in Figures 7a-h. All Figures correspond to local minima of
the modified E2 error surface, except for Figures 7c and 7f, which
are two views of one solution on basis of the modified E1 error
function.
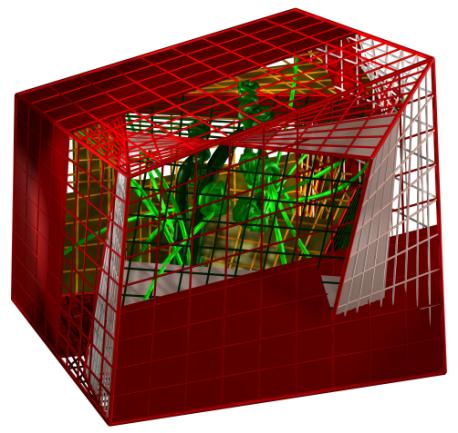



Figures 9 a-h. Eight illustrations of
solutions obtained for the modified landscape
4. Comparison with a direct
method
The organic forms of the
previous section can be contrasted with the structures which result from a more
direct approach. For this end, we wrote another piece of code which gives the
user the choice of locating the edges of the hypercube. Once an artist has
acquired familiarity with hypercube visualizations, it becomes straightforward
to locate the edges in such a way that a large base, as well as a horizontal
first floor, and a relatively simple roof structure, fit into the whole (see
Figure 10). Afterwards, a tree can be constructed so that its endpoints
coincide with the vertices of the hypercube visualization.
The direct approach leads to
forms which are easily constructible. But there is a price to pay. The organic quality of the whole is inferior
to the one of the visualizations of the previous section. In special, it is
hard to conceal that the tree structure did not really define the location of
the vertices. We notice that the preference of humans for organic forms has
been extensively documented (see [8]). This preference is not limited to the
aesthetic domain. In the field of environmental psychology, much evidence has
been collected which demonstrates that organic environments reduce stress, with
several positive side effects [9] (this is also one of the reasons why studying
organic and fractal forms in educational settings has been advocated [10]). The
technical challenge of realizing constructions based on the forms of the previous
section is higher than in case of constructions obtained by the direct method,
but it may be more rewarding, both from an artistic and a broader humanistic
point of view.
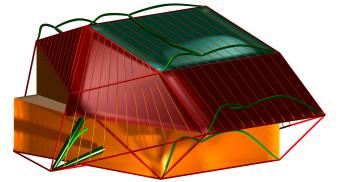
Figure 10 a-c. Two views of the same house
obtained by the direct method
5. Discussion
In this paper, we described
how organic design can be guided by the desire to include symbols, such as the
hypercube symbol. Symbols of this type are culturally universal. All people who
are scientifically contemplating the physical structure of our universe, or
cosmology, see the same universe, and use the same mathematical symbols. But as
was demonstrated in Soddu’s work, one of the strengths of generative design is
that it allows one to integrate visual elements which reflect the soul of
cities, which is very culture specific. The present method is complementary,
but not contradictory to this approach. In future work, we hope to develop a
hybrid method, in which visualizations of universal symbols are cast into a
design methodology that is flexible enough to refer to visual patterns of
cultural specificity.
References
[1] Henderson K (1983) The
fourth dimension and non-Euclidean geometry in modern art. Princeton University
Press, Princeton
[2] Banchoff T (1996) Beyond
the third dimension. Geometry, computer graphics, and higher dimensions.
Freeman and Company, New York
[3] Robbin T (1992)
Fourfield. Computers, art and the fourth dimension. Bulfinch Press, New York;
see also tonyrobbin.home.att.net/
[4] see www.bathsheba.com/
[5] see
www.generativedesign.com/
[6] Van Loocke Ph (2004)
Visualization of data on basis of fractal growth. Fractals 12(1): 123-136
[7] Van Loocke Ph, Joye Y
(2006) Symmetry breaking in fields as a methodology for three-dimensional
fractal form generation. Computer and Graphics 30(5) (about to appear)
[8] Joye Y (2005)
Evolutionary and cognitive motivations for fractal art and art and design
education. The international Journal of Art and Design Education 24(2), 175-185
[9] Ulrich R (1993)
Biophilia, biophobia and natural landscapes. In: Kellert S, Wilson E (eds) The
biophilia hypothesis. Island Press Washington, pp 73-137
[10] Joye Y, Van Loocke Ph (2006) Systems
theory and organic construction. Motivation and educational perspectives.
Systems Research and Behavioral Science 23 (about to appear)