Flocking Orchestra - to play a
type of generative music by interaction between human and flocking agents
Prof. T. Unemi, BEng, MEng, DEng.
Department of Information Systems Science, Soka
University, Tokyo, Japan.
e-mail: unemi@iss.soka.ac.jp
Dr. D. Bisig, BSc, MSc, PhD.
Artificial Intelligence Laboratory,University of
Zurich, Switzerland.
e-mail: dbisig@ifi.unizh.ch
1. Concept
"Flocking Orchestra" is an interactive installation that
employs flocking algorithms to produce music and visuals and thereby creates an
interaction between artificial and real life [1]. The artifical life aspect
conists of agents which behave basically according to BOID’s rules [2] and form
complex flocking groups in a virtual 3D space. The users who represent the real
life can interact with the agents through their motions, which are tracked by a
video camera. Each agent controls a MIDI instrument whose playing style depends
on the agent's state. In this system, the user acts as a conductor who
influences the flock's musical activity. In addition to gestural interaction,
the acoustic properties of the system can be modified on the fly by using an
intuitive GUI. The acoustical and visual output of the system results from the
combination of the behaviors of both the users and the flock. It therefore
creates on the behavioral level a mixing of natural and artificial reality.
The system has
been designed to run on a variety of different computational configuration
ranging from small laptops to exhibition scale installations. This type of
scalability allows people to experience the installation not only at exhibition
sites but also at home.
2. Insight
The basic mechanism to realize flocking behavior consists of the
calculation of an acceleration vector for each agent during each time step.
This vector results from the combination of three types of forces: collision
avoidance with other agents and the boundary surfaces, velocity alignment with
other agents, and attraction toward the center of gravity of other agents. Each
agent perceives the agents of the same species only within a limited perception
area. In addition to these three basic flocking forces, there exists a forth force
which causes attraction towards the front surface of the virtual space. This
force is applied to an agent when it detects motion in the real world. This
motion is calculated by calculating the difference in the color values at each
pixel location between two successive camera images. By tuning the parameters,
such as the balance among the forces and the minimum value of the velocity, it
is possible to realize a variety of flocking.
The appearance of the agents can be adjusted by modifying both their shapes
and colors. The current version provides six choices of shapes: square, sphere,
paper plane, paper crane, ASCII faces, and hexadecimal ID. Two color values can
be freely assigned to agents of each species. These two color values are then
mixed depending the amount of motion that has been detected by the agent. An
alternative way of choosing colors consists ion the assignment of a fixed
single color that has originally been sampled from Japanese Origami
paper.
It is also possible to change the background images covering the bounding
planes of the virtual space. Each surface can be filled by either a uniform
color, an image retrieved from a file, or an image that has been captured from
live video. Finally, it is also possible to cover the entire background by a
single image instead of displaying the five textured bounding planes.
The agents are divided into two species: the melodists and the
percussionists. As the names indicate, these species play different types of
instruments. A melodist plays a tonal instrument by mapping its position to the
parameters for a note. It’s vertical coordinate is mapped to the note’s pitch,
it’s horizontal coordinate is mapped to the note’s pan position, and it’s depth
is mapped to the note’s amplitude. Via the GUI, a variety of musical parameters
can be defined: instrument types, rhythm, tempo, scale, pitch range, chord
progression, etc. These parameters can be chosen in order to mimic particular
musical genres such as classic, rock, jazz, ethnic, and so on.
3. Configuration
This installation requires a Macintosh computer (G4 or G5 CPU) which runs
the MacOS X operating system and a web camera. Therefore, this installation
runs on any of the currently available Macintosh computers. In order to have
the installation respond acceptably quick to interaction, screen resolution
should be reduced to 320 x 240 pixels on slower machines (below 600 MHz).
Powerful machines such as a 2.5GHz dual G5 machine will easily display more
than 512 agents at a resolution of 640 by 480 pixels. Figure 1 shows a typical
exhibition configuration such as the one that will be used at the GA conference
2005.
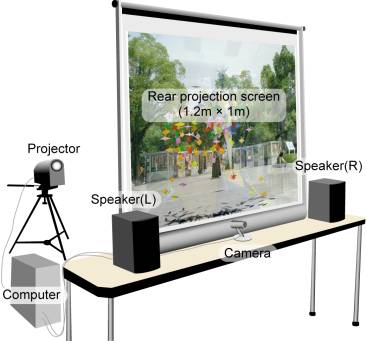
Figure 1. The hardware configuration
for an exhibition scale installation.
References
[1] Unemi, T. and Bisig, D. : Playing Music by Conducting BOID Agents - A Style of Interaction in the Life with A-Life, Proceedings of A-Life IX, pp. 546-550, 2004.
[2] Reynolds, C. W. : Flocks, herds, and schools: A distributed behavioral model, Computer Graphics, 21(4):25--34, (SIGGRAPH '87 Conference Proceedings) 1987.